Baseline
Before evaluating the performance of SLAM algorithms in the presence of perturbations, it is important to understand what their performance is when environments are mostly free of perturbations and the inputs to the algorithms are of good quality. We refer to this as baseline performance.
 |
|---|
| Frames from sequences used for evaluating the baseline performance of RGB-D algorithms from the TUM RGB-D and ICL-NUIM datasets |
Algorithms with RGB-D input support (ORB-SLAM2, ORB-SLAM3, ReFusion, FullFusion, and ElasticFusion) are evaluated on 12 sequences of the TUM RGB-D dataset, captured with a Kinect camera and the 4 synthetic sequences of the ICL-NUIM dataset.
ICL-NUIM results
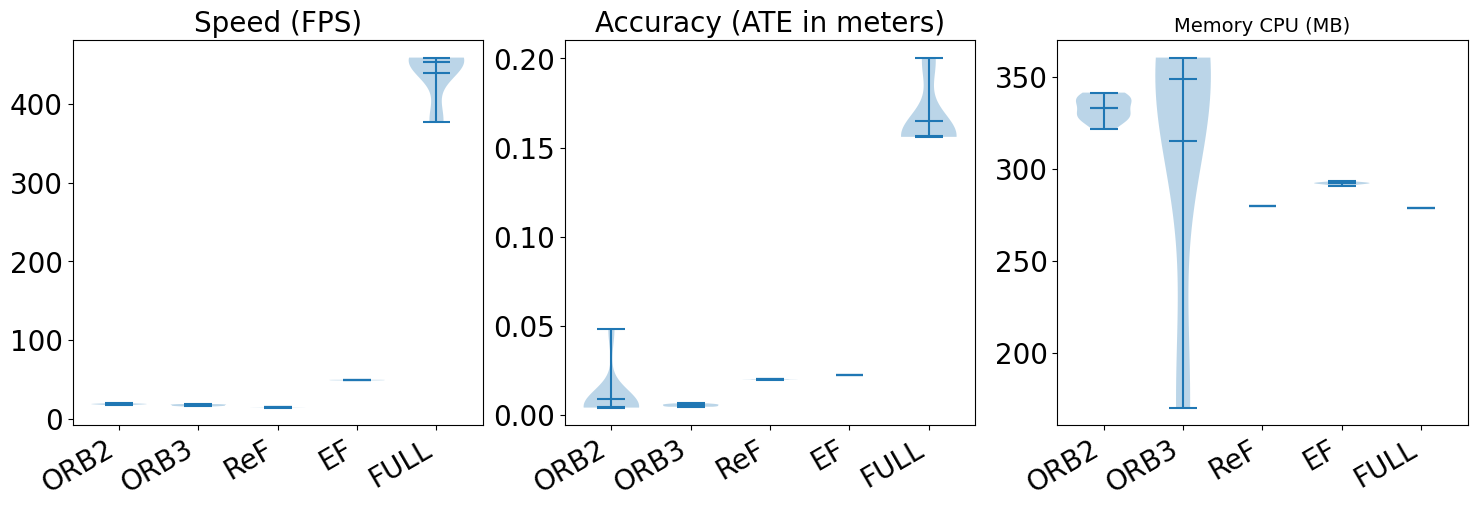
ICL-NUIM Living Room 0
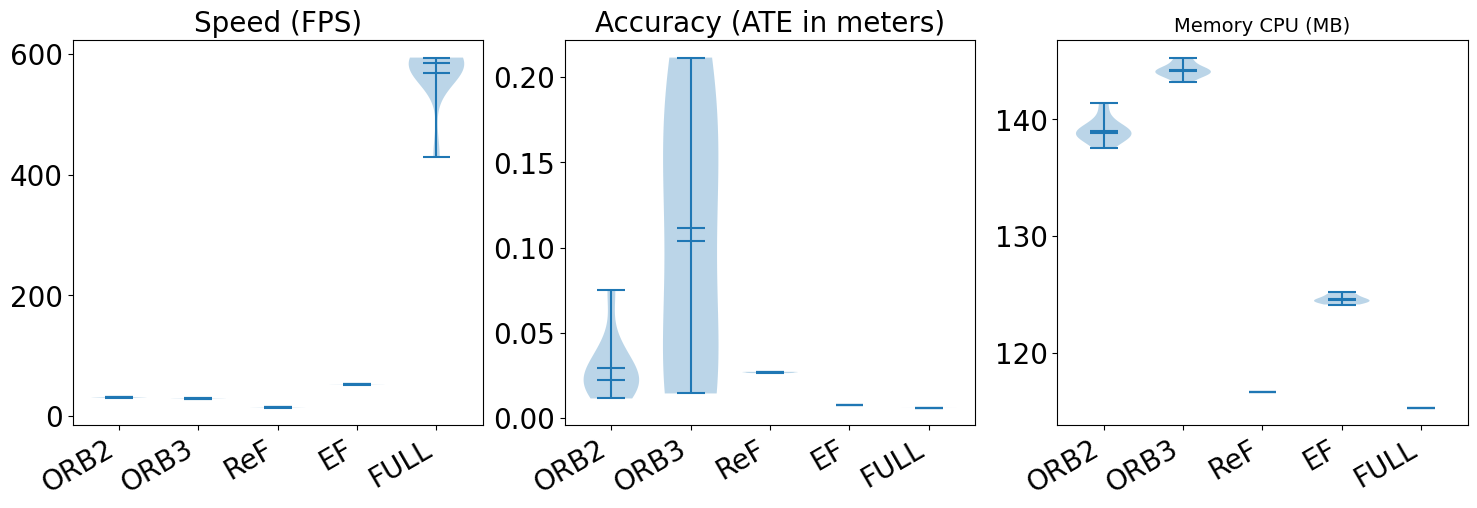
ICL-NUIM Living Room 1
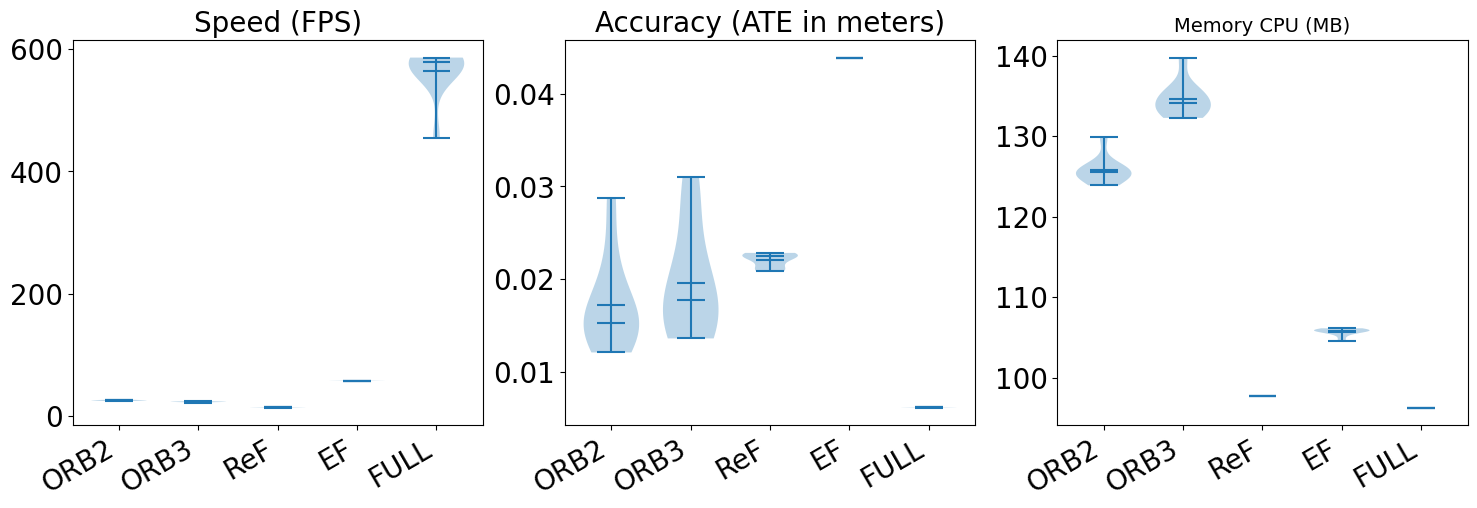
ICL-NUIM Living Room 2
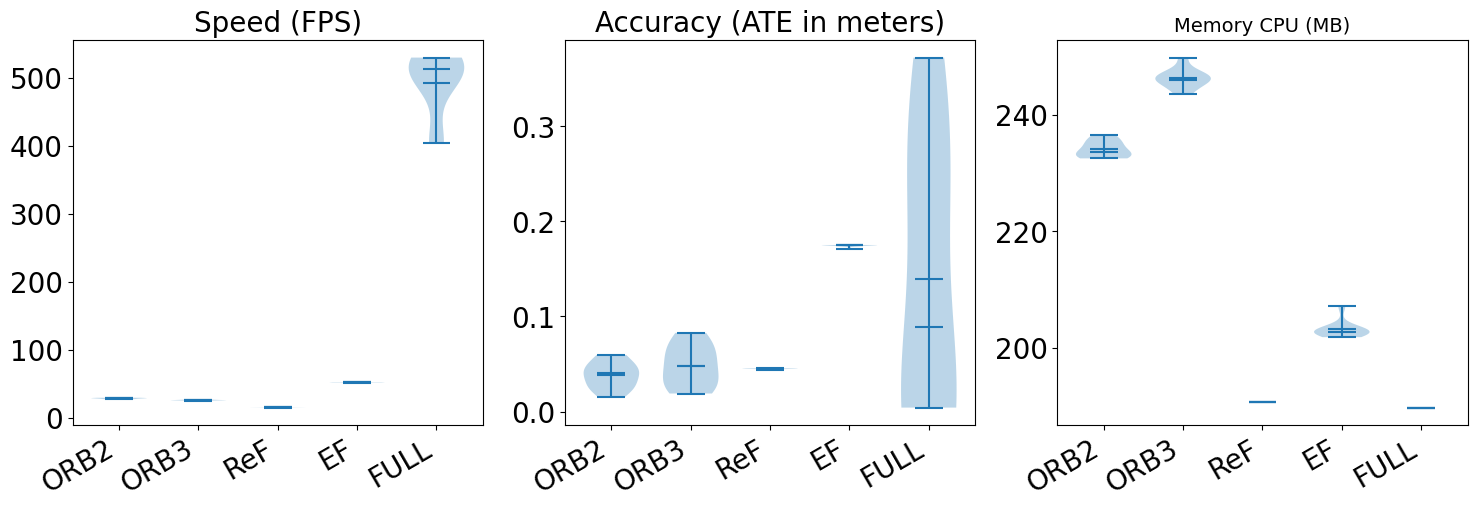
ICL-NUIM Living Room 3
TUM RGB-D results
 |
|---|
| Frames from sequences used for evaluating stereo(-inertial) algorithms from the EuRoC MAV dataset |
Algorithms with stereo and stereo-inertial support are evaluated on the easy and medium sequences of the EuRoC MAV dataset.
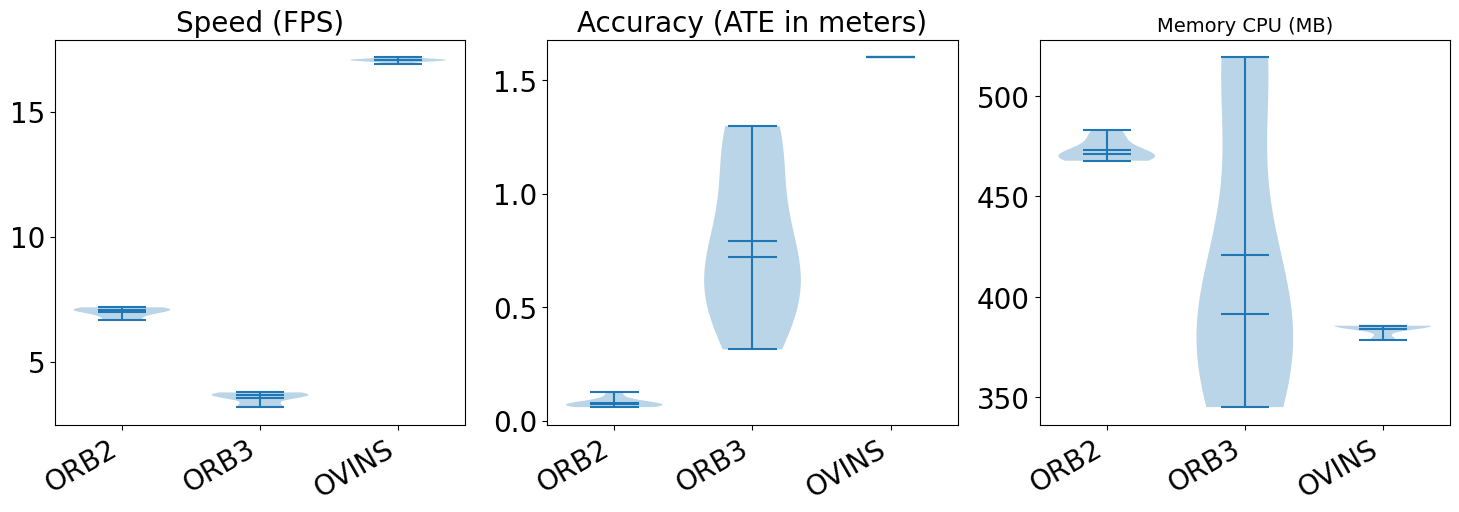
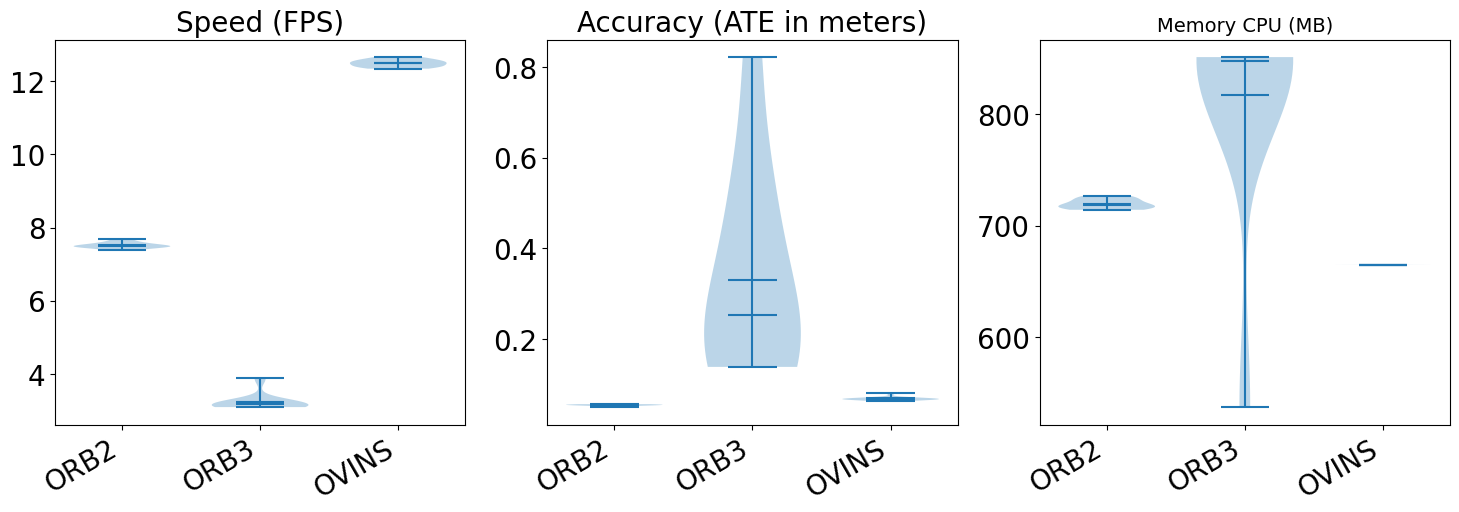
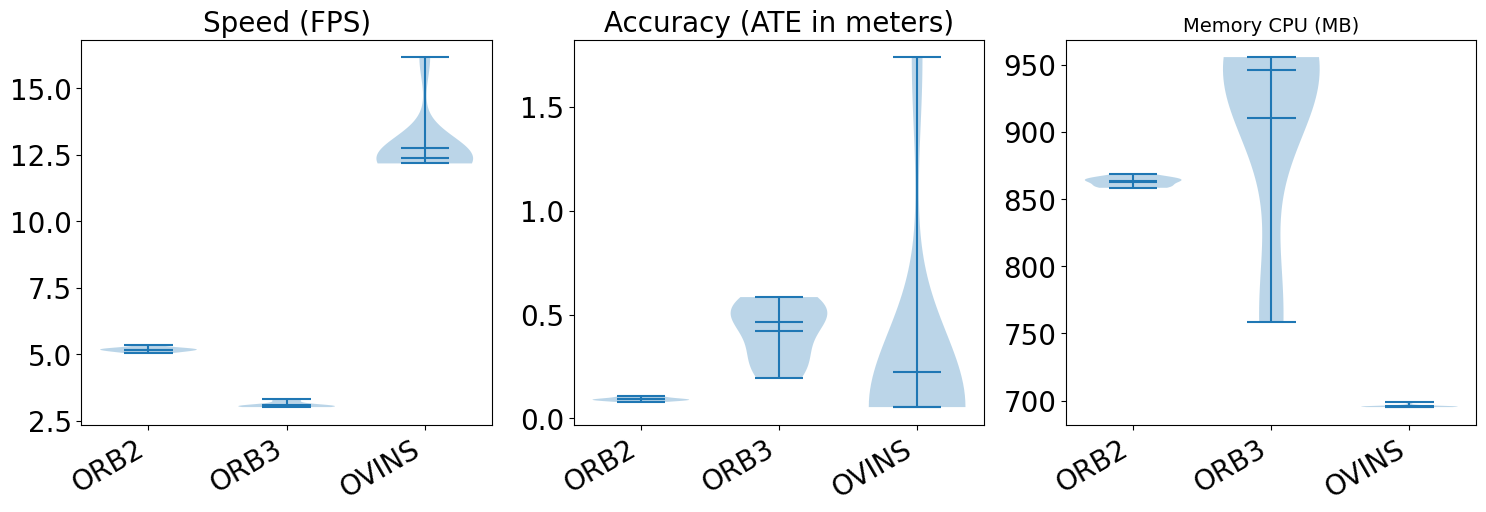
EuRoC results
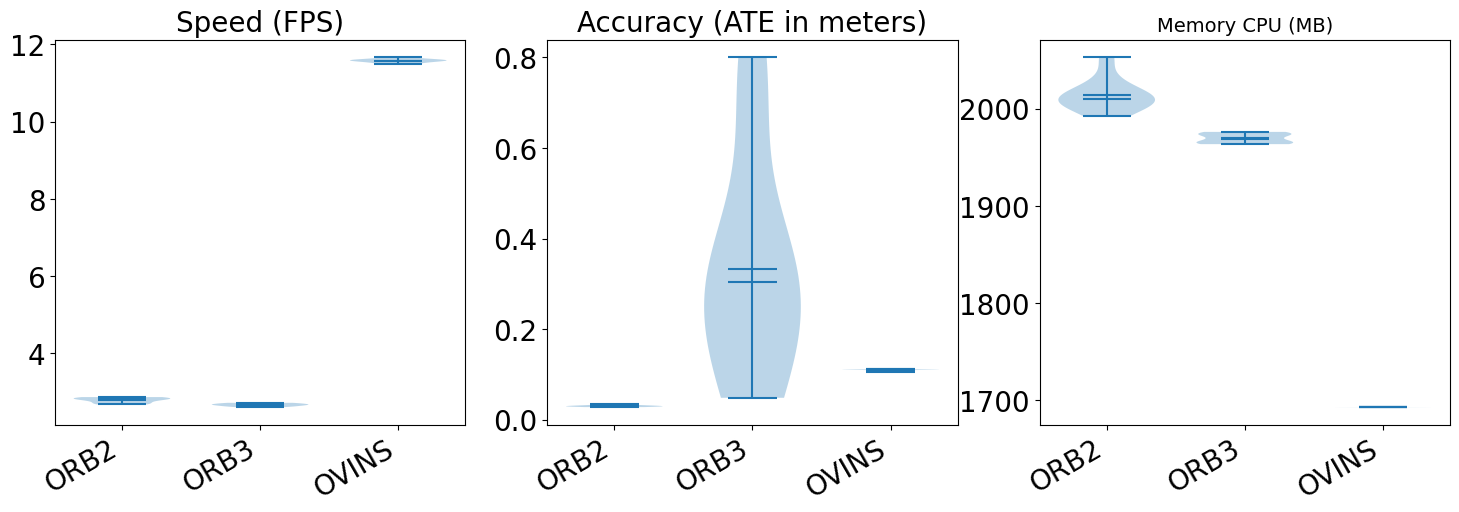
Machine Hall 01 (easy)
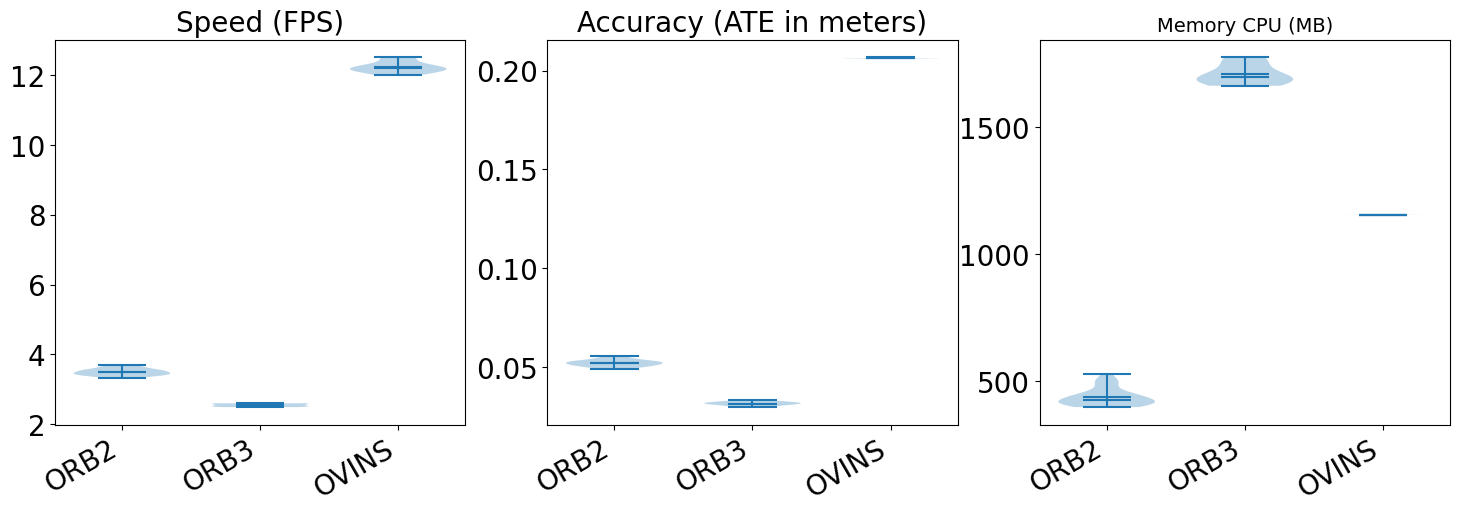
Machine Hall 02 (easy)
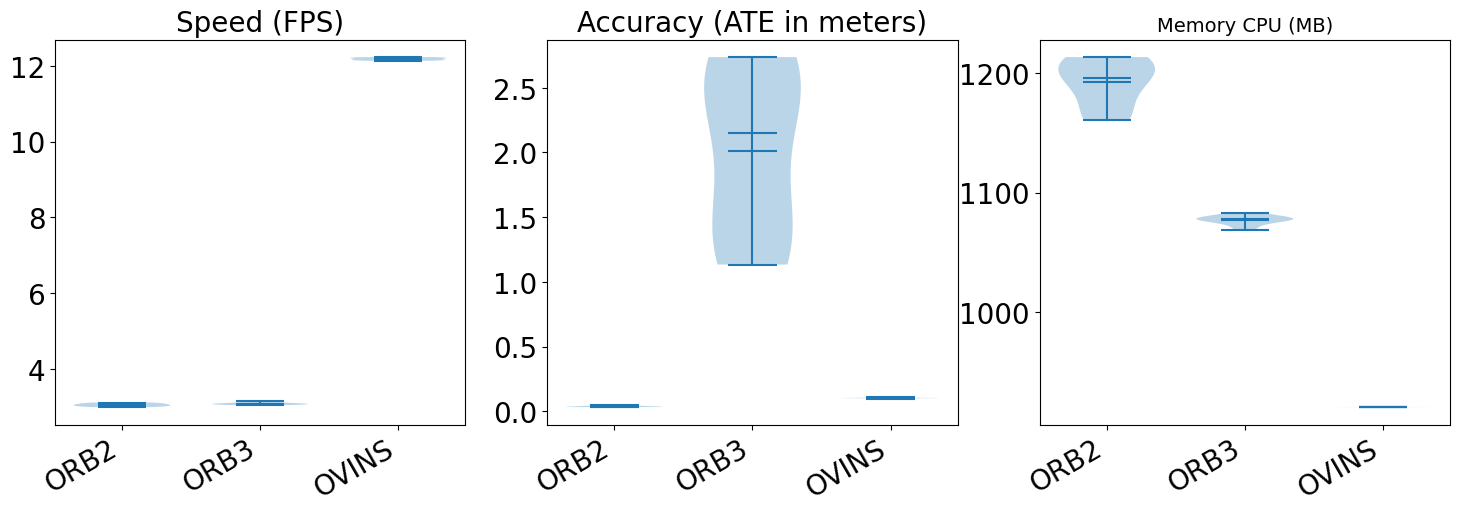
Machine Hall 03 (medium)
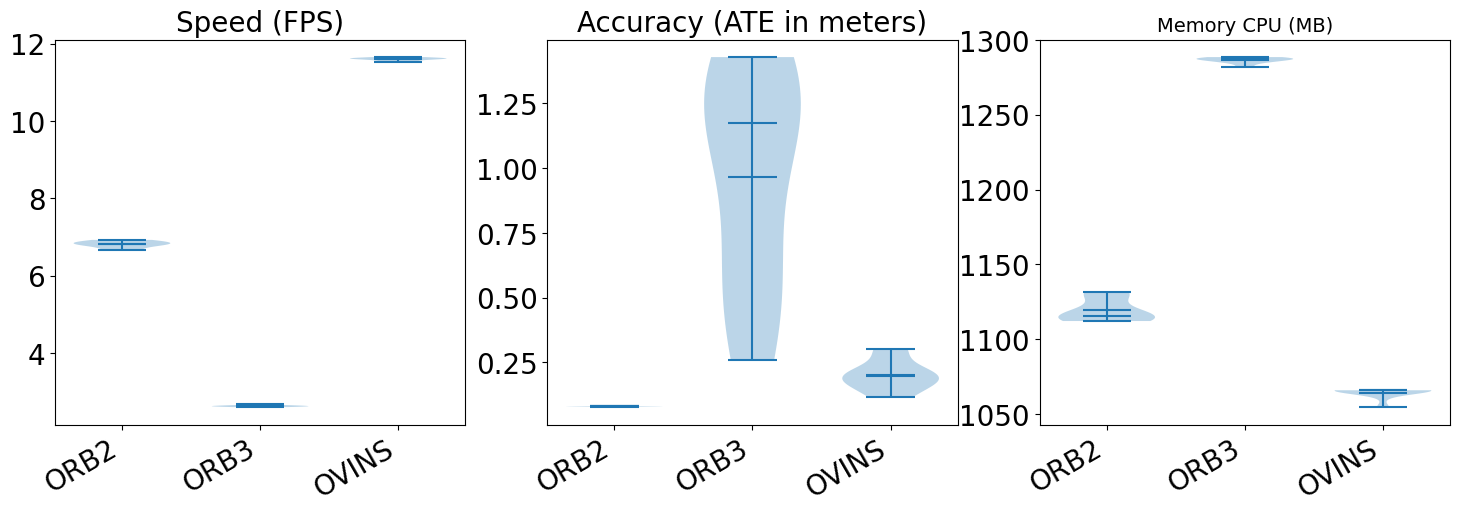
Vicon Room1 01 (easy)
Vicon Room1 02 (medium)
Vicon Room2 01 (easy)
Vicon Room2 02 (medium)