 |
|---|
| Frames from sequences used for evaluating performance in fast motion scenarios from the EuRoC MAV dataset |
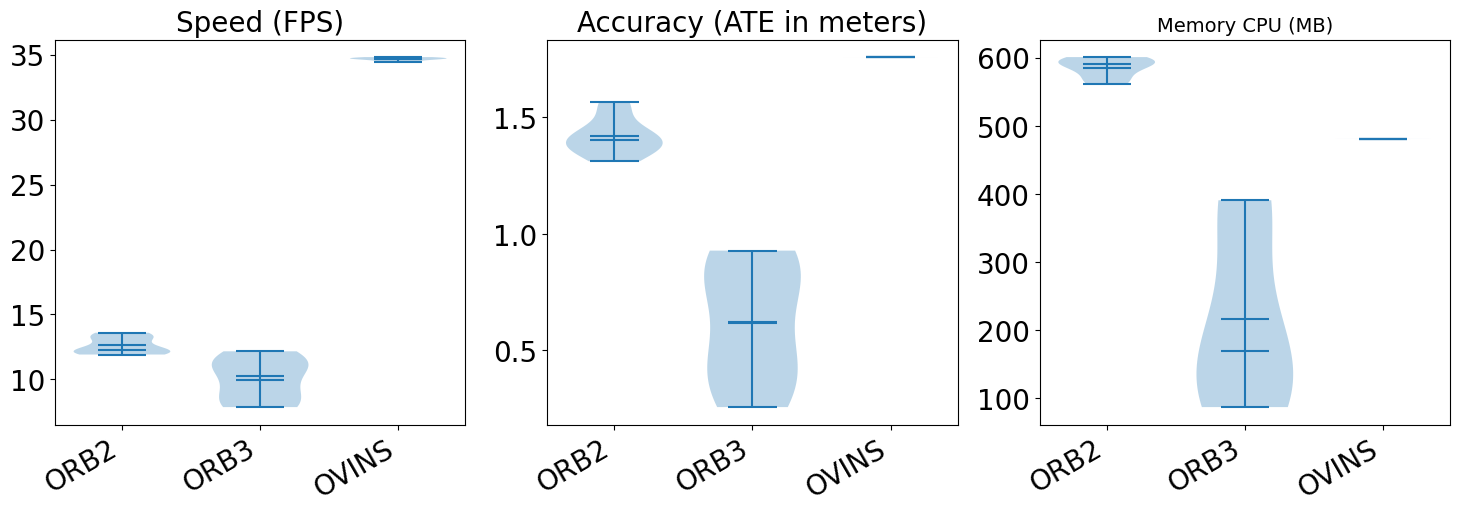
Fast movement may lead to poor input data featuring disturbances such as motion blur, and encumbering feature detection and matching. We evaluate stereo and stereo-inertial algorithms (ORB-SLAM2, ORB-SLAM3, and OpenVINS) on the difficult sequences of the EuRoC MAV dataset. The data was acquired using a drone flying at high speeds in an industrial setting and in cluttered rooms.
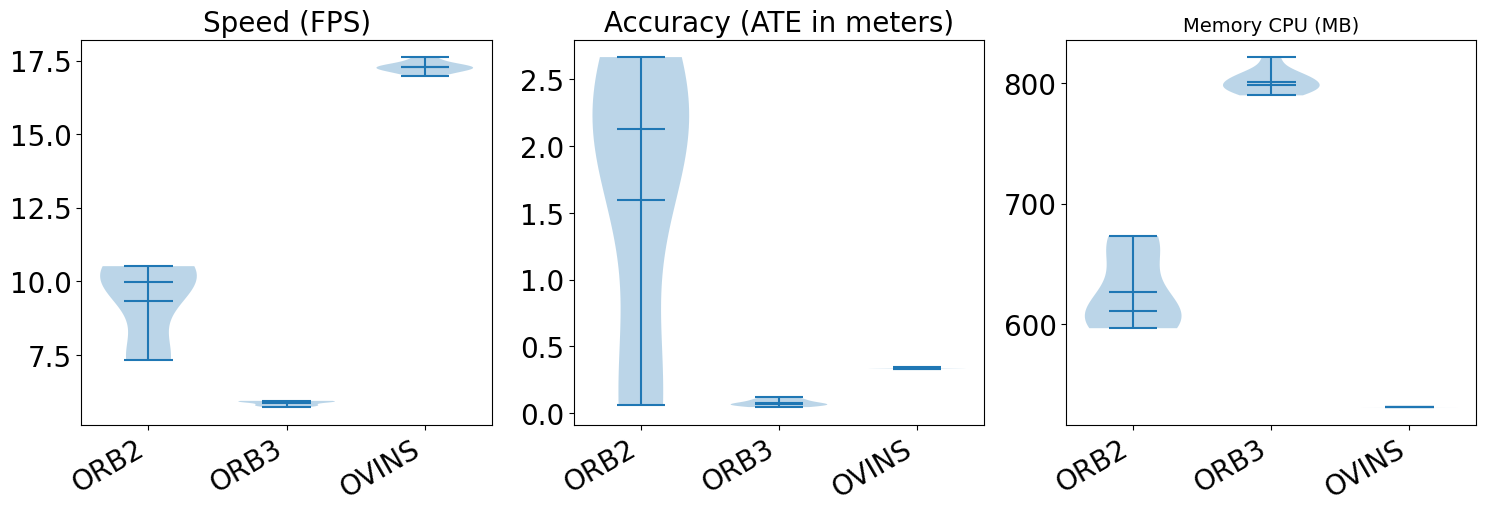
Machine Hall 04
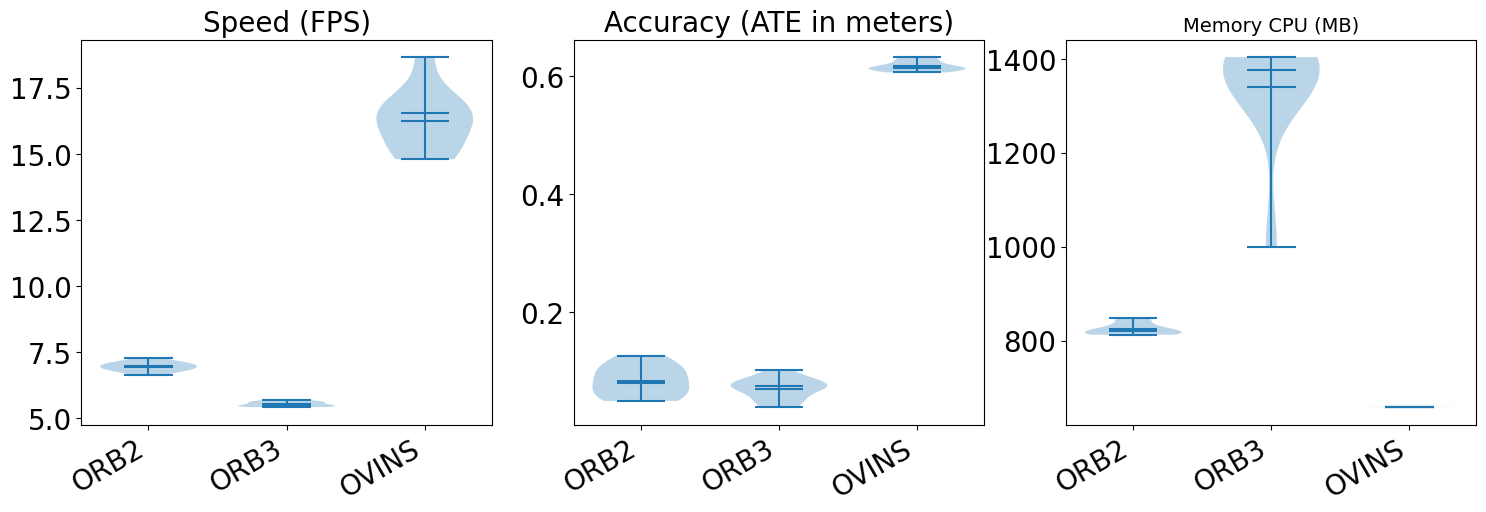
Machine Hall 05
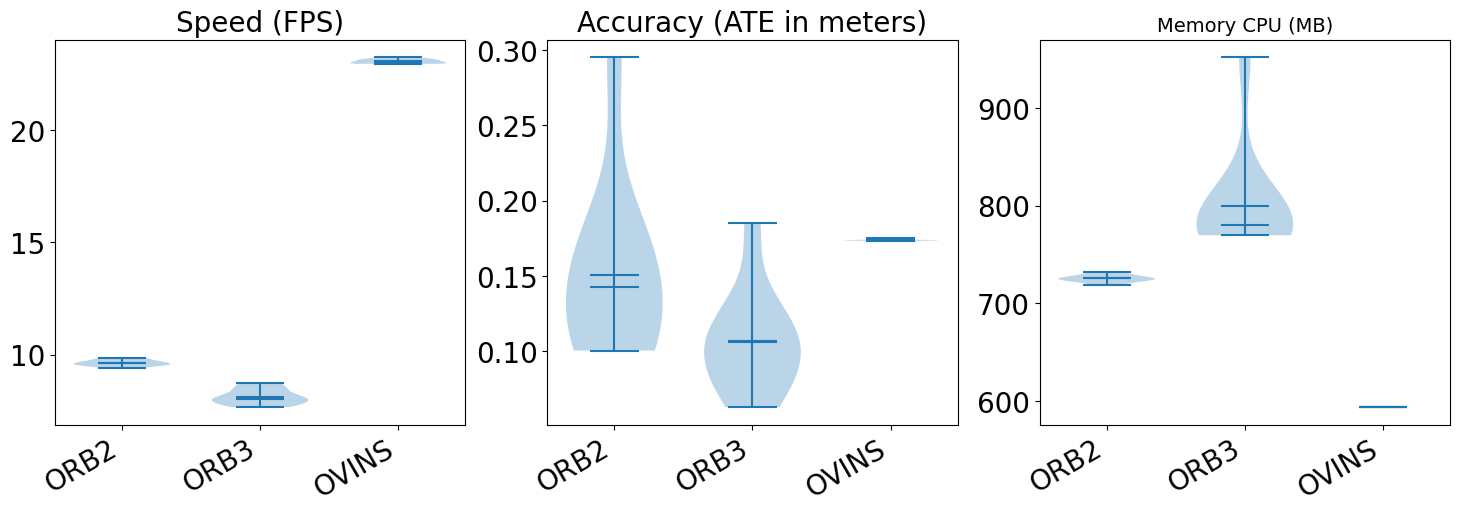
Vicon Room1 03
Vicon Room2 03