 |
|---|
| Frames from sequences used for evaluating performance in the presence of illumination changes from the ETH Illumination dataset |
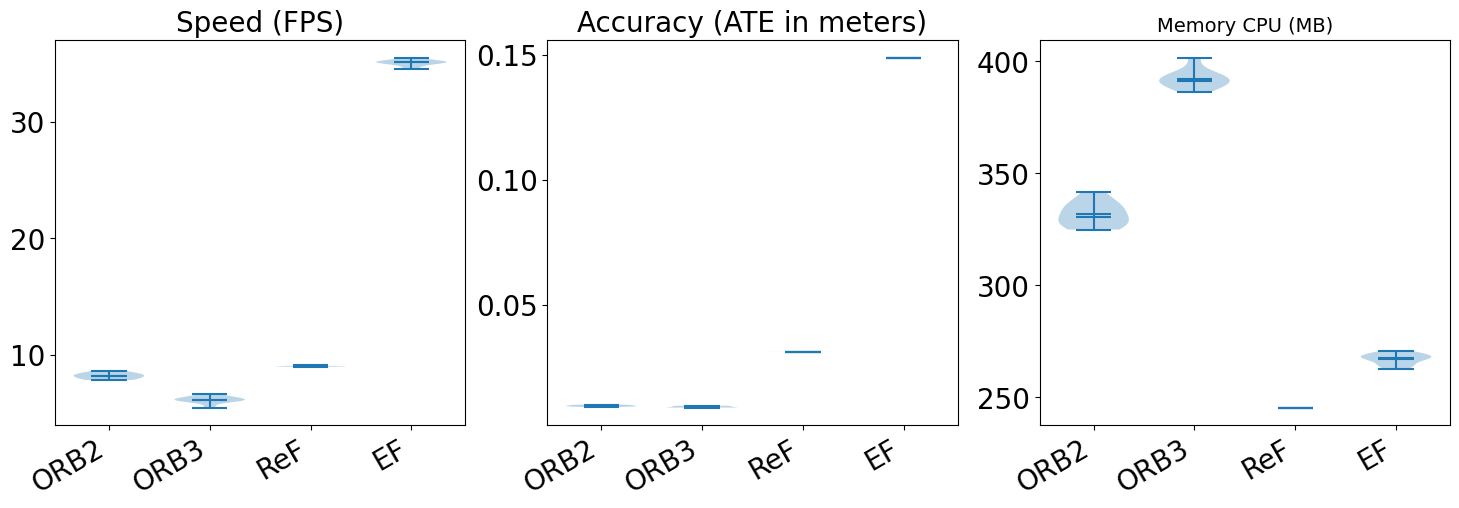
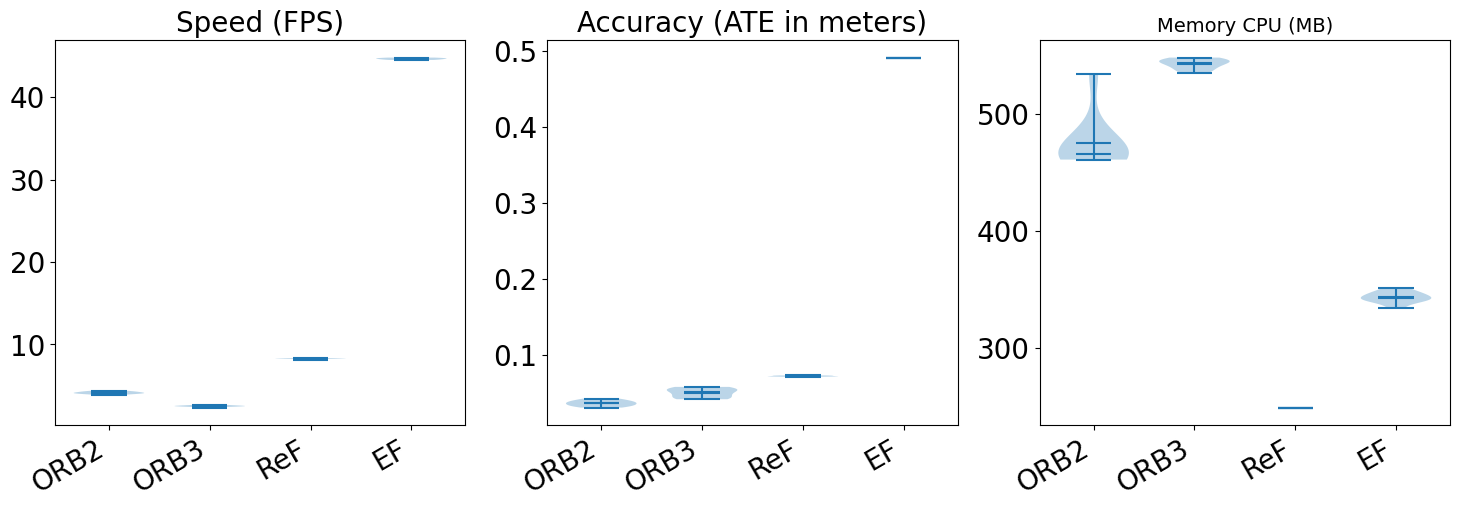
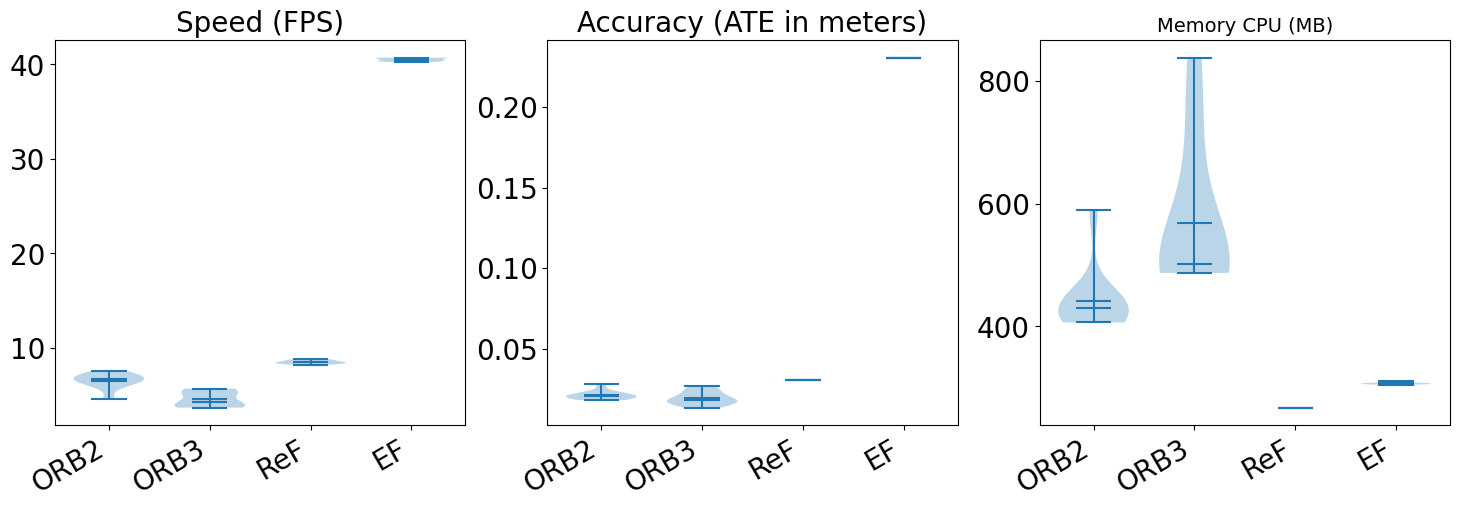
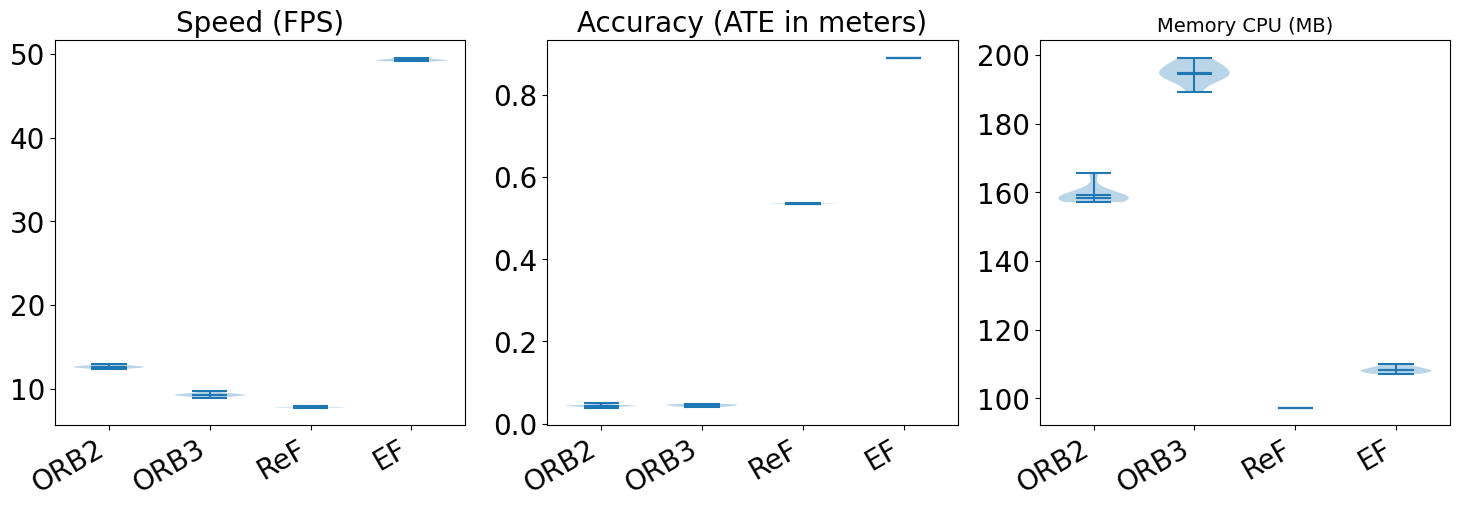
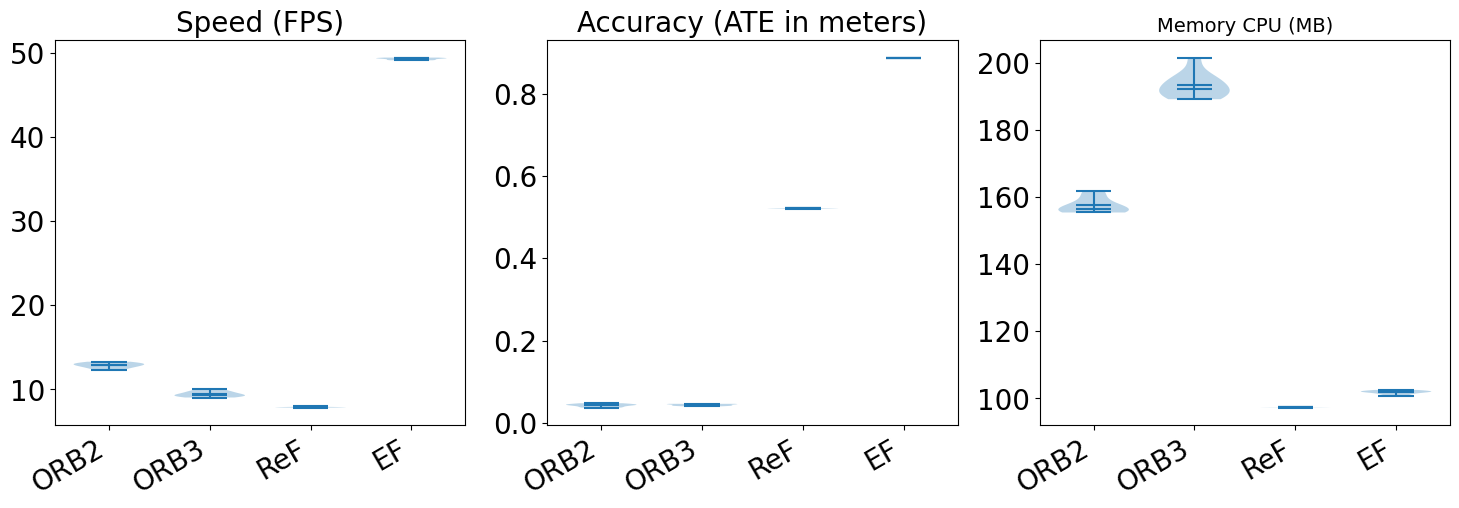
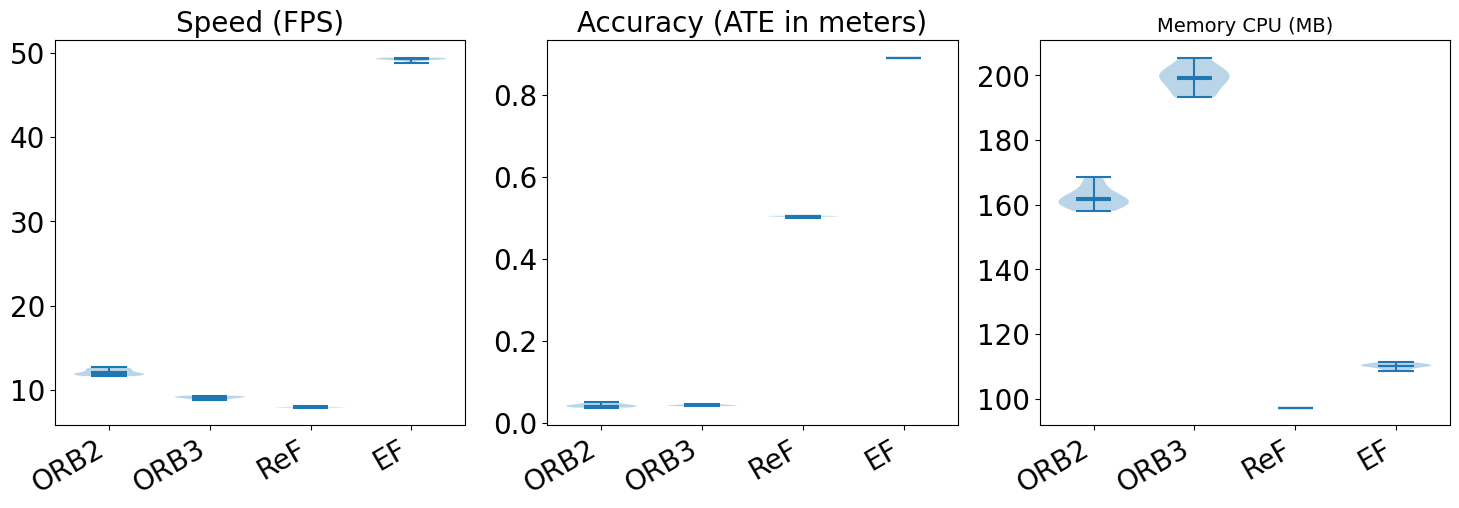
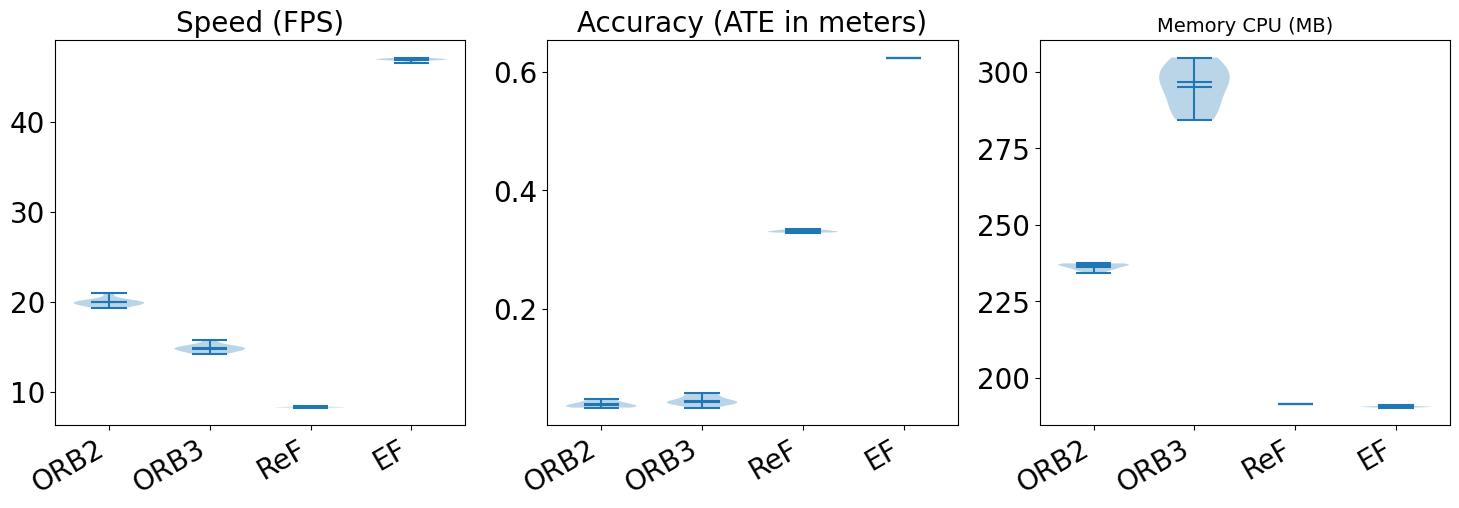
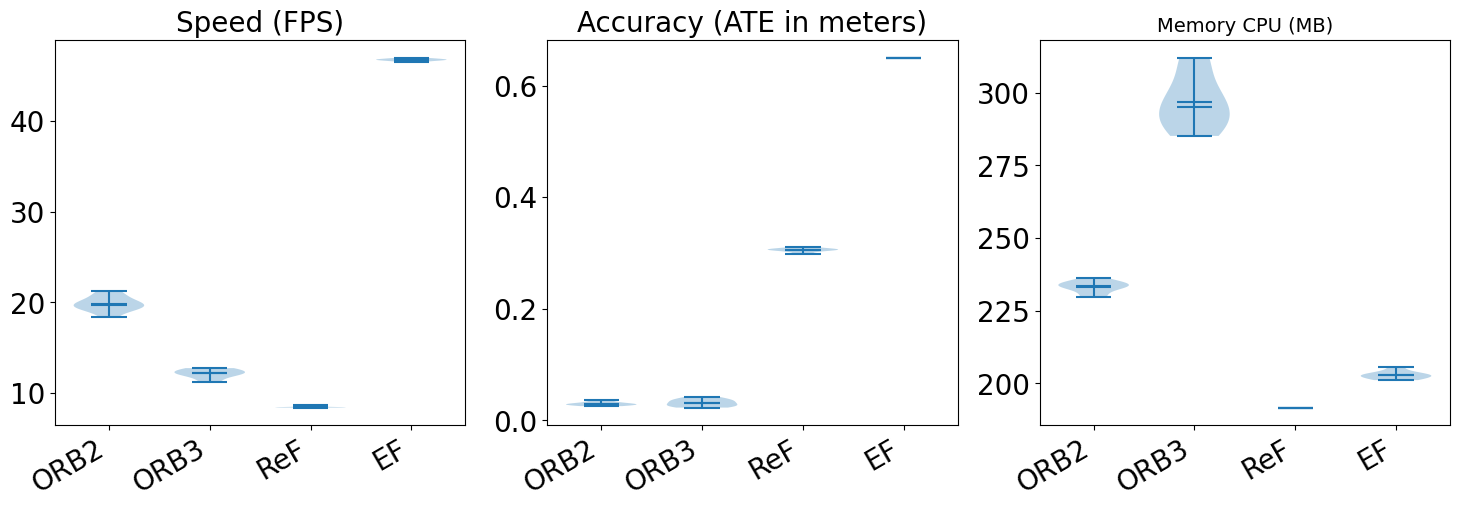
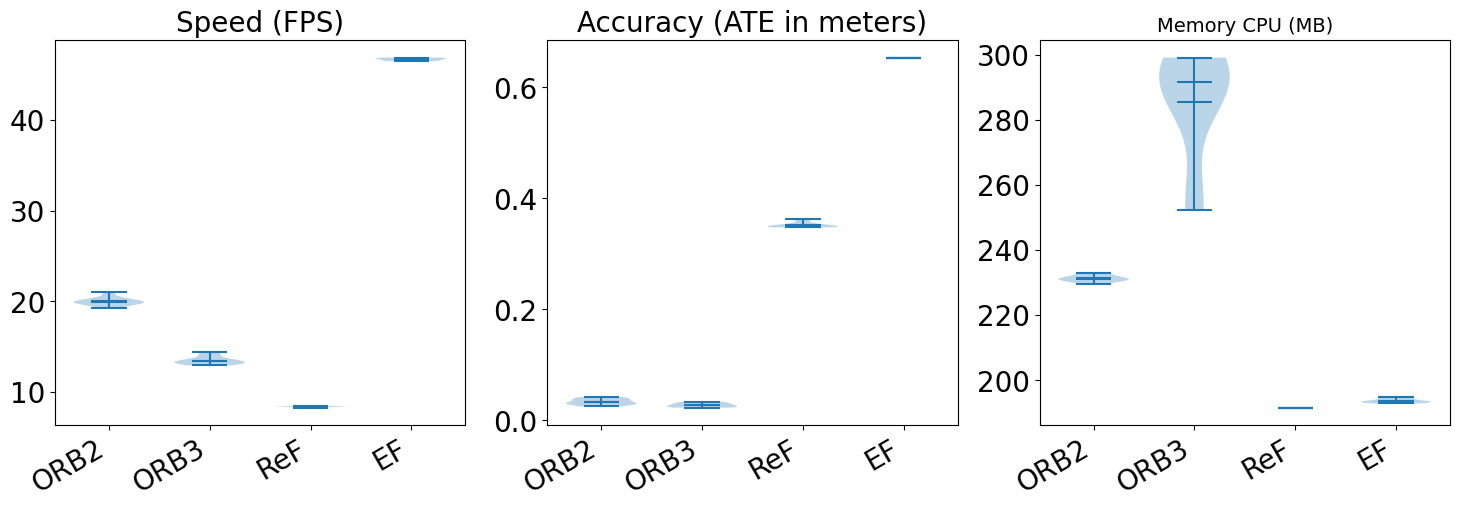
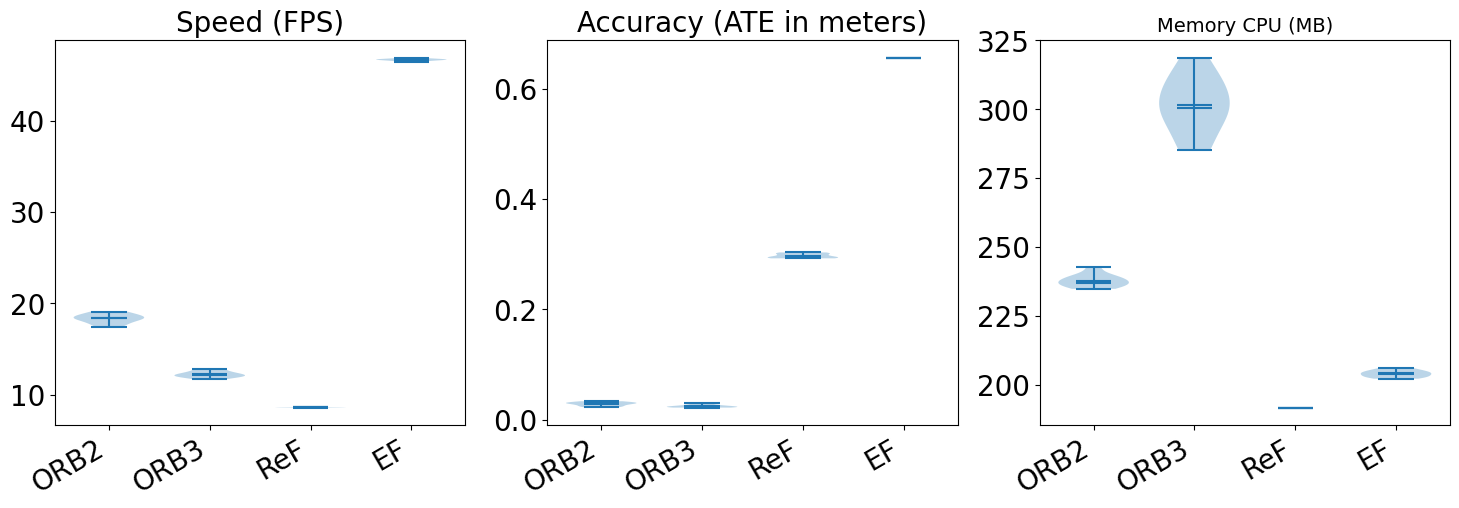
Many SLAM algorithms assume that lighting will be consistent and rely on color information to estimate the camera position. In practice, lighting conditions often change unpredictably - for example if a light source is temporarily occluded. Here we study the effect of lighting changes on two dense systems which use a photometric error as part of their pose computation, ReFusion and ElasticFusion, and two sparse, feature-based algorithms: ORB-SLAM2 and ORB-SLAM3.
We use the ETH Illumination dataset, which is based on the TUM and ICL-NUIM datasets, containing both real and synthetic sequences with local and global illumination changes, as well as sequences where a flashlight shining from the perspective of the camera is used. It is immediately clear from the results that thanks to lighting-invariance, the feature-based algorithms perform significantly better.
Real Flashlight
Real Global Illumination
Real Local Illumination
Synthetic1 Global Illumination
Synthetic1 Local Illumination
Synthetic1 Local + Global Illumination
Synthetic2 Flashlight
Synthetic2 Global Illumination
Synthetic2 Local Illumination
Synthetic2 Local + Global Illumination